


- Design and application of rigid and soft piezoelectric ceramics for precision and adaptive robotic systems
Lv Yunpenga, He Haiminb,*, Gong Youpingc and Lan Yeshenga
aSchool of Mechanical and Electrical Engineering,Quzhou College of Technology, Quzhou, Zhejiang 324000, China
bCollege of Mechanical and Electronic Engineering, Pingxiang University, Pingxiang, Jiangxi 337000, China
cCollege of Mechanical Engineering, Hangzhou Dianzi University, Hangzhou, Zhejiang 310018, ChinaThis article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Piezoelectric ceramics are pivotal in advancing robotics, especially in miniaturized piezoelectric robots (MPRs), due to their capability to transform electrical signals into mechanical motion. This study explores the classification of piezoelectric ceramics into rigid and soft variants, emphasizing their distinct roles in robotic applications. Rigid ceramics, such as lead zirconate titanate (PZT), are renowned for their superior piezoelectric coefficients, precision, and durability, with advancements in additive manufacturing enabling complex geometries and multifunctionality. Conversely, soft piezoelectric materials, including polyvinylidene fluoride (PVDF) and macrofiber composites (MFCs), are tailored for applications requiring flexibility and large deformation capabilities, excelling in biomimetic and adaptive robotic systems. The integration of rigid and soft piezoelectric ceramics offers a pathway for hybrid systems that capitalize on the precision of rigid materials and the adaptability of soft ones, fostering innovative designs and sustainable material strategies in robotics. This work provides a comprehensive analysis of material properties, fabrication techniques, and application potential, underscoring their transformative role in the evolution of robotics.
Keywords: Piezoelectric ceramic materials, Robotics.
Piezoelectric ceramics have emerged as essential components in robotics, particularly in miniaturized piezoelectric robots (MPRs), where their ability to directly convert electrical signals into mechanical motion has enabled innovative designs and functionalities. The classification of these materials into rigid and soft variants highlights the diverse material strategies employed to meet the evolving demands of robotics applications. This division is particularly crucial when considering the contrasting requirements of precision and adaptability in rigid and soft robotic systems, respectively [1,2].
Rigid piezoelectric ceramics
Rigid piezoelectric ceramics, predominantly based on lead zirconate titanate (PZT), represent a cornerstone in the development of high-performance actuating elements for robotics. PZT materials are valued for their high piezoelectric coefficients, sensitivity, and ability to operate under elevated temperatures, making them ideal for applications requiring high precision, fast response, and large load capacities. Traditional fabrication of PZT ceramics involves well-established processes such as powder sintering and machining, ensuring reliable performance and widespread accessibility [3]. Recent advancements in additive manufacturing have introduced new possibilities for PZT ceramics, enabling the fabrication of complex, non-conventional geometries and further enhancing piezoelectric properties [4]. additive manufacturing techniques such as stereolithography, selective laser sintering, and fused deposition modeling allow the integration of multiple functionalities, such as self-sensing and actuation, within a single robotic element. These advancements address the limitations of traditional rigid ceramics, including fragility and limited deformation, by leveraging structural designs that optimize performance while maintaining high durability [5].
On the other hand, soft piezoelectric ceramics, such as polyvinylidene difluoride (PVDF) and macrofiber composites (MFCs), offer an entirely different set of advantages. These materials excel in applications that demand flexibility, lightweight construction, and large deformation capabilities. PVDF, as a polymer-based piezoelectric material, is known for its ability to accommodate bending and stretching while maintaining functional integrity. Commonly employed in unimorph configurations with substrates like polyethylene terephthalate (PET), PVDF films allow controlled deformation to achieve complex motion patterns. Such configurations are particularly advantageous in biomimetic robotics, where adaptability and resilience are paramount. Innovations in PVDF-based designs, including multi-film assemblies and optimized electrode configurations, have further expanded their applications in robotics, enabling functionalities such as load carrying and trajectory control [6].
MFCs, characterized by their laminate structures incorporating piezoelectric fibers and epoxy matrices, provide a balance between flexibility and mechanical robustness. These materials operate in the d33 mode, generating significant output force and deformation under applied voltages, which is particularly useful for underwater and soft terrestrial robots. The ability of MFCs to withstand high actuation voltages, coupled with their waterproof and durable nature, has made them indispensable in challenging environments. Applications include underwater robots mimicking aquatic creatures and soft terrestrial robots employing inchworm-like locomotion. The structural adaptability of MFCs, combined with their capacity for high force output, has positioned them as a versatile option for next-generation robotic systems [7].
The interplay between rigid and soft piezoelectric ceramics offers a unique opportunity to explore hybrid systems that combine the strengths of both material classes. For instance, rigid PZT ceramics can deliver high-precision actuation for core robotic functions, while soft materials like PVDF and MFCs enable adaptive interfaces and biomimetic movements. Such complementary use of materials underscores the importance of a materials-centric approach in advancing robotics. This manuscript delves into the detailed materials design, fabrication techniques, and application potential of rigid and soft piezoelectric ceramics, highlighting their role in shaping the future of robotics through innovative and sustainable material strategies.
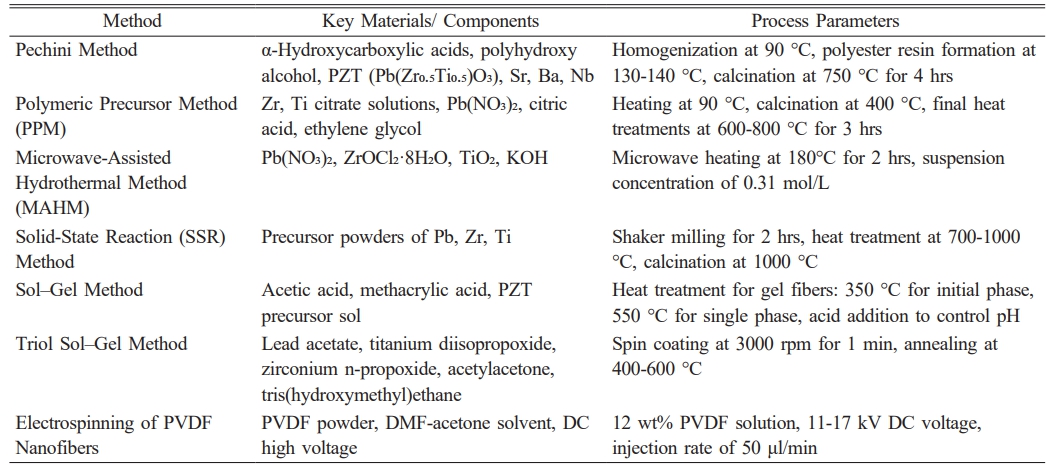
The Pechini method, as described by Varela et al., for synthesizing PZT leverages the ability of certain α-hydroxycarboxylic acids to form polybasic acid chelates with various cations. When these chelates are combined with a polyhydroxy alcohol and heated, they undergo polymerization, ensuring uniform distribution of the cations. Subsequent removal of the organic components at relatively low temperatures (around 300 °C) results in the formation of reactive oxides with precise stoichiometric control. They. synthesized PZT with the composition Pb(Zr₀.₅Ti₀.₅)O₃ using a metal-citrate complex polyesterified in ethylene glycol. Appropriate amounts of Zr, Ti, Pb, and dopants such as Sr, Ba, or Nb solutions were mixed and homogenized by stirring at 90 °C for three hours. The mixture was then heated to 130-140 °C, producing a viscous polyester resin. The organic components were primarily decomposed by gradually heating the resin in a glass beaker within a box furnace. The temperature was increased incrementally from room temperature to 300 °C, followed by heating to 400 °C, with a soaking time of two hours at each step. Calcination was performed at 750 °C for four hours, and the resulting powder was subsequently ball-milled for one hour to ensure uniformity [8].
Oliveira et al. explored two distinct methods for synthesizing PZT: the polymeric precursor method (PPM) and the microwave-assisted hydrothermal method (MAHM). In the polymeric precursor method, zirconium and titanium citrate solutions with known concentrations were employed to synthesize PZT powders with a Zr/Ti ratio of 52/48. The mixture was homogenized under continuous stirring and heating at approximately 90 °C. To compensate for potential loss of organic matter during synthesis, a 5% excess of aqueous Pb(NO₃)₂ solution was added to maintain stoichiometry, followed by the addition of citric acid. The resulting clear solution was combined with ethylene glycol to form a polyester, with a molar ratio of lead:citric acid:ethylene glycol set at 1:4:16. The polyester was calcined at 400 °C to eliminate organic matter, and the resulting material was subjected to heat treatment at 600 °C, 700 °C, and 800 °C for three hours to achieve the final PZT product [9, 10].
They have also employed the microwave-assisted hydrothermal method using a commercial microwave furnace (MARCH-CEM, USA) operating at 2.45 GHz and 600 W. For this process, an aqueous suspension of Pb(NO₃)₂, ZrOCl₂·8H₂O, and TiO₂ was prepared, to which a 1.8 mol/L KOH solution was added. This resulted in a precursor suspension with a final concentration of 0.31 mol/L PZT. The suspension was stirred at room temperature and completely solubilized during the reaction, aided by the pressure and temperature control of the microwave furnace. The KOH acted as a mineralizing agent, facilitating mass transport, crystal nucleation, and growth, thereby accelerating the reaction. Approximately 30 ml of the suspension was transferred to a Teflon vessel with a capacity of 90 ml. The vessel was filled to 30% of its volume to maximize pressure and efficiency, sealed, and heated in the microwave furnace at 180 °C for two hours. After synthesis, a light yellow precipitate formed, which was separated from the residual solution via centrifugation. The precipitate was washed with distilled water until neutral pH was achieved and then dried at room temperature [11].
Darmawan Hidayat et al. investigated the one-step synthesis of lead zirconate titanate (PbZr(1-x)TixO₃; PZT) particles using the solid-state reaction method. The synthesis was carried out at an x-value of 0.48 and involved various operating temperatures ranging from 700 °C to 1000 °C. Prior to the reaction, the precursor powders were shaker milled for 2 hours to ensure homogeneity. The powders were then subjected to heat treatment in a muffle furnace. Structural analysis of the diffraction patterns confirmed the formation of PZT perovskite particles. Additionally, the study observed a phase evolution from a tetragonal structure (at 800 °C and 900 °C) to a coexistence of tetragonal and rhombohedral phases in samples synthesized at 1000 °C. The crystallite sizes of the synthesized and commercially obtained PZT particles at 1000 °C were determined to be 36.00 nm and 47.98 nm, respectively. The synthesized particles exhibited a monodispersed size distribution with an average particle size of approximately 4.7 μm. This study demonstrated the successful one-step synthesis of PZT particles via the SSR method, facilitated by pre-mixed shaker milling [12].
Mei Zhang et al. explored the preparation of PZT fibers using the sol–gel method, with acetic acid and methacrylic acid employed to regulate the pH of the precursor sol. The study analyzed and compared the chemical evolution of the precursors, the thermal and crystallization behaviors of PZT gel fibers, and the resulting microstructures with and without acid addition. It was found that the inclusion of acids significantly improved the properties of the fibers, with methacrylic acid particularly enhancing fiber length (4-5 cm) after heat treatment and facilitating the formation of a single perovskite phase at 550 °C. The use of methacrylic acid influenced the hydrolysis and condensation processes of the sol, resulting in improved macroscopic properties of the PZT gel fibers. Methacrylic acid facilitated the formation of longer molecular chains in the gel structure, as confirmed by FTIR analysis, which identified the role of the C=C bond in forming extended polymeric chains. Consequently, longer PZT fibers, approximately 43 μm in diameter and 4-5 cm in length, could be successfully fabricated. Thermal and XRD analyses further revealed that the modified chemical structure of the precursors influenced the thermal behavior, allowing for the perovskite phase to form at 350 °C and become a single phase at 550 °C after heat treatment. In contrast, when acetic acid was used to control precursor hydrolysis, the resulting PZT fibers were denser and more homogeneous but shorter in length compared to those produced with methacrylic acid. The formation of the pure perovskite phase required a higher temperature of 700 °C in this case [13].
Manoch Naksata et al. investigated the microstructure and phase evolution during the thermal decomposition of sol–gel precursor coatings of PbZr₀.₅₃Ti₀.₄₇O₃ (PZT) deposited on platinized silicon substrates. The study employed a triol sol–gel synthesis route. The sols were prepared using lead acetate, titanium(IV) diisopropoxide bispentanedionate, zirconium(IV) n-propoxide, acetylacetone, and 1,1,1-tris(hydroxymethyl)ethane. In the preparation, zirconium n-propoxide was initially reacted with acetylacetone under a dry nitrogen atmosphere at approximately 90 °C for 2 hours. After cooling, titanium diisopropoxide bisacetylacetonate, lead acetate trihydrate, and 1,1,1-tris(hydroxymethyl)ethane was added sequentially, and the mixture was heated at 70 °C for 4 hours. The final sol concentration was adjusted to 1.21 mol·dm⁻³, and for spin coating, it was diluted to 0.75 mol·dm⁻³ using 2-methoxyethanol, with a 10 mol% excess of lead acetate to ensure stoichiometry. The sols were deposited on Pt/Ti/SiO₂/Si substrates using a 0.2 μm Nylon membrane filter, followed by spin coating at 3000 rpm for 1 minute. Heat treatment involved an initial annealing step at 400 °C for 10 minutes using a custom-built hot plate, followed by further annealing for 30 minutes at temperatures ranging from 450 °C to 600 °C. The temperature fluctuations during heating were controlled within ± 3 °C, with the setup shielded to prevent variability due to airflows. Phase development analysis revealed the formation of a PbPt₃ intermetallic phase at the Pt/PZT interface during the initial crystallization. Perovskite PZT began forming at approximately 500 °C, but temperatures of 550 °C and above were required to develop ferroelectric hysteresis loops. The crystallization of single-layer PZT films (~0.4 μm thick) to the perovskite phase initiated around 500 °C, but ferroelectric properties were only evident at 550 °C. Improved ferroelectric performance was achieved in films annealed at 600 °C [14].
Soft PZT
Jin-Ping Qu et al. developed polylactide (PLA)/polyvinylidene fluoride (PVDF) hybrid dielectrics with high melt flow index ratios using an innovative twin-eccentric rotor extruder (TERE) [15]. The TERE design leverages continuous elongational flow, originating from alternate compression and release during melt blending. Unlike conventional shear flow, this elongational flow enhances the dispersion and alignment of the dispersed phase along the elongation direction, resulting in finely tuned anisotropic microstructures in PLA/PVDF blends. With varying composition ratios, two distinct phase transitions and three structural regions were identified, including the formation of an interpenetrating network structure at 60-70 wt% PVDF loading. This study further elucidated the microstructural evolution mechanisms based on the interplay of elongational flow and material properties [16].
Xumin Pan et al. demonstrated the synthesis of ultra-long poly(vinylidene fluoride) (PVDF) nanofibers with optimized β-phase content using an electrospinning method under varying direct current (DC) voltages. The enhancement of the β-phase content in PVDF nanofibers significantly improved their piezoelectric performance, with nearly triple the output voltage and current under identical strain conditions compared to non-optimized fibers. For the synthesis, PVDF solutions (12 wt%) were prepared by dissolving 1.2 g of PVDF powder into a 10 ml DMF-acetone solvent mixture (3:7 v/v). The mixture was magnetically stirred at 80 °C for 3 hours to achieve a homogeneous precursor solution. The resulting transparent solution was loaded into a Hamilton 5 ml syringe mounted on a syringe pump. The needle used for electrospinning had an inner diameter of 0.41 mm. A DC voltage ranging from 11 to 17 kV, supplied by a Betran DC high-voltage power system, was applied between the syringe needle and a sample collector to eject the PVDF precursors at an injection rate of 50 μl/min. This study underscores the significant influence of β-phase content on the piezoelectric properties of PVDF nanofibers and highlights the critical role of DC voltage control during electrospinning in achieving enhanced functional performance [17].
A lightweight, thin, and eco-friendly lead-free MFC has been developed for human motion monitoring. This MFC utilizes multilevel structure-engineered (K,Na)NbO₃ (KNN)-based ceramics as the piezoelectric matrix, optimized through detailed simulation analysis. Finite element analysis (FEA) was employed to study the variation in the effective electric field and piezo-potential within the KNN-based MFC during polarization and under different stress distributions. Experimental results demonstrate exceptional performance, including a high output voltage (~25 V), output current (~25 µA), and an instantaneous power density of 80.42 µW/cm². When attached to the human body, the MFC effectively converts even subtle motions into significant electrical responses, highlighting its superior motion monitoring capabilities. This research offers a pathway for the advancement of lead-free MFCs and presents KNN-based ceramics as a promising material for next-generation smart sensing devices [18]. Table 1
Piezoelectric ceramics, both rigid and soft, have established themselves as foundational materials in the field of robotics, enabling a wide range of functionalities from high-precision actuation to adaptive biomimetic movements. Rigid ceramics, particularly PZT, offer unmatched performance in terms of precision, response speed, and durability, while recent advancements in additive manufacturing have expanded their design and functional capabilities. Soft ceramics, including PVDF and MFCs, provide the flexibility and adaptability needed for applications requiring lightweight construction and large deformation, particularly in biomimetic and environmental robotics. The complementary strengths of these material classes open the door to hybrid robotic systems that combine the precision of rigid ceramics with the adaptability of soft ones. This materials-centric approach not only advances the technical capabilities of robotic systems but also aligns with sustainable and innovative design principles, paving the way for the next generation of robotics.
1. Quzhou Science and Technology Bureau “Research on the Technology of Omni-directional Autonomous Inspection Robot Based on Four-wheel Independent Drive” (Quzhou Key Science and Technology Tackling Project 2023K261).
2. Research and Optimization of Active Collision Avoidance Control System for Intelligent Vehicles Based on Deep Learning by Quzhou Municipal Bureau of Science and Technology (Quzhou Municipal Guiding Science and Technology Tackling Project ZD2022162).
3. Research and Development of Ultrasonic Rolling Conformal Co-processing Technology for High-speed Railway Bearing Rings Based on Cavitation Effect by Quzhou Municipal Bureau of Science and Technology (Quzhou Key Science and Technology Tackling Project 2023K242).
- 1. J. Deubener, M. Allix, M.J. Davis, A. Duran, T. Höche, T. Honma, T. Komatsu, S. Krüger, I. Mitra, R. Müller, S. Nakane, M.J. Pascual, J.W.P. Schmelzer, E.D. Zanotto, and S. Zhou, J. Non-Cryst. Solids 501 (2018) 3-10.
-

- 2. M. Hiratsuka, T. Honma, and T. Komatsu, Int. J. Ceram. Eng. Sci. 2 (2020) 332341.
-
- 3. M. Ninomiya and M. Wada, New Glass 11 (1996) 4046 .
- 4. Q. Fu, G.H. Beall, and C.M. Smith, MRS Bull. 42 (2017) 220225.
-
- 5. P.P. Fedorov, A.A. Luginina, and A.I. Popov, J. Fluorine Chem. 172 (2015) 2250.
-
- 6. K. Shinozaki, T. Honma, K. Oh-ishi, and T. Komatsu, Opt. Mater. 33 (2011) 13501356.
-
- 7. T. Honma, K. Maeda, S. Nakane, and K. Shinozaki, J. Ceram. Soc. Jpn. 130[8] (2022) 545-551.
-
- 8. B.D. Stojanović, V.V. Skorokhod, and M.V. Nikolić, in “Advanced Science and Technology of Sintering” (Springer, Boston, 1999) p. 355-366.
-
- 9. V.A. Chaudhari and G.K. Bichile, Physica B 405 (2010) 534-539
-
- 10. M.A. Zaghete, J.A. Varela, M. Cilense, C.O. Paiva-Santos, W.C. Las, and E. Longo, Ceram. Int. 25 (1999) pp. 239-244.
-
- 11. C.A. Oliveira, E. Longo, J.A. Varela, and M.A. Zaghete, Ceram. Int. 40[1] (2014) 1717-1722.
-
- 12. D. Hidayat, M. Taufik, and S. Setianto, Heliyon 8[3] (2022) e0912577.
-
- 13. M. Zhang, I.M.M. Salvado, and P.M. Vilarinho, J. Am. Ceram. Soc. 86[5] (2003) 775-781.
-
- 14. M. Naksata, R. Brydson, and S.J. Milne J. Am. Ceram. Soc. 86[9] (2003) 1560-1566.
-
- 15. T. Wu, Z.X. Huang, D.Z. Wang, and J.P. Qu, Adv. Ind. Eng. Polym. Res. 2 (2019) 93-101.
- 16. H. Zhang, X. Wei, and J.P. Qu, Polymer 224 (2021) 123719.
-
- 17. X. Pan, Z. Wang, Z. Cao, S. Zhang, Y. He, Y. Zhang, K. Chen, Y. Hu, and H. Gu, Smart Mater. Struct. 25 (2016) 105010.
-
- 18. C. Zhu, X. Huang, Q. Zhou, H. Xue, L. Jiang, and J. Wu, Small (2024) 2410074.
-
 This Article
This Article
-
2025; 26(1): 129-133
Published on Feb 28, 2025
- 10.36410/jcpr.2025.26.1.129
- Received on Dec 20, 2024
- Revised on Feb 1, 2025
- Accepted on Feb 5, 2025
Services
Shared
Correspondence to
- He Haimin
-
College of Mechanical and Electronic Engineering, Pingxiang University, Pingxiang, Jiangxi 337000, China
Tel : +86 18057002961 Fax: +86 18057002961 - E-mail: lvyyp99124@163.com
Clean-Energy Research Institute(CRI), Hanyang University, 222, Wangsimni-ro, Seongdong-gu, Seoul, 04763, Korea
E-mail: jcpr@hanyang.ac.kr